Статистика
Счётик посещений
Юзеры OnLine
Авторизация
| Главная » Файлы » Электроника |
Микрошаговый контроллер биполярного шагового двигателя V5.1
| 15.12.2013, 22:19 | |||||||||||||||||||||||||||||||||||||||||
Контроллер биполярного шагового двигателя на основе микроконтроллера PIC18F2320. Контроллер поддерживает управляющие сигналы STEP, DIR и ENABLE. В контроллере реализован микрошаговый режим и режим удержания с понижением тока фаз. Данный модуль является улучшенной версией микрошагового контроллера биполярного двигателя версии 5.0, в частности, при самостоятельной сборке, более "безопасен" в настройке. Микрошаговый контроллер биполярного шагового двигателя V5.1 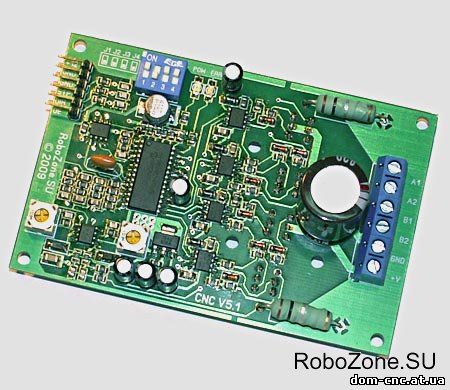 Особенности контроллера 5.1: 1. Аппаратная ШИМ регулировка ограничения тока фаз 2. Режим удержания с понижением тока фаз при отсутствии сигнала STEP более 2-х секунд 3. Большой диапазон напряжения и тока фаз 4. Использование универсальных управляющих сигналов STEP, DIR, ENABLE 5. Работа в режимах «полный шаг», «полушаг» и «микрошаг» 6. Частота сигнала STEP до 100 khz. 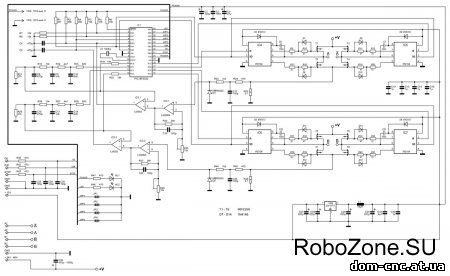 Регулировка тока фаз осуществляется с помощью резисторов R35 и R49. При указанных номиналах на схеме возможно установить максимальный ток до 6,5 ампер. Перемычками J1-J3 на плате переключаются режимы работы «шаг», «полушаг» и «микрошаг»:
Режим удержания с понижением тока фаз будет работать при установленной перемычке J4. Ток удержания зависит от номиналов R16 и R22, с уменьшением их номиналов уменьшится и ток удержания. Любое изменение в конфигурации перемычек, требует перезапуск контроллера. Печатная плата контроллера разведена в двухстороннем варианте под «ЛУТ». 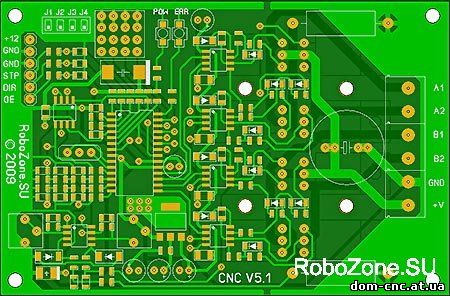 При наведении курсора на элемент - отображается его номинал, поэтому нумерация элементов не приведена, в архиве для скачки присутствует "карта" расположения элементов для удобства самостоятельного изготовления контроллера. Силовые транзисторы T1 – T8 монтируются на плату с нижней стороны печатной платы (пластиком к плате) для удобства крепления радиатора как на фото ниже. 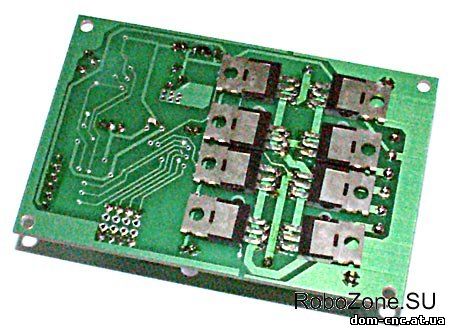 Изоляция транзисторов через теплопроводящие прокладки от радиатора ОБЯЗАТЕЛЬНА!!! Настройка сводится в основном к расчету резисторов R35 и R49 от которых зависит ток ШД. R35 = R49 = 39000 / ( 3,175 / ( R * I ) – 1 )), где R = R25 и R48, I = требуемый ток фазы. Желательно проконтролировать величину выставленного тока на резисторах R25 и R48 осциллографом, т.к. на практике он получается немного завышен от расчетного, причем чем выше напряжение питания силовой части, тем больше отклонение. Объясняется данный эффект задержками в аналоговых частях схемы и конструктива самого шагового двигателя. Частота ШИМ зависит от индуктивности обмоток двигателя и номиналов R2, C4 и R4, C5 которые определяют время Toff. Toff = - Ln ( 0,5 ) * R * C, где R = R2 = R4 и C = C4 = C5. При данных номиналах Toff = 12,7 мкСек. Рекомендуемые модели ШД для данного драйвера: FL42, FL57, FL86. Так же возможно использование и старых двигателей типа ДШИ. Схема контроллера в формате sPlan 6.0, разводка печатной платы под ЛУТ в формате Sprint-Layout 5.0 и файл бесплатной версии прошивки в формате *.hex вы можете скачать ниже. Источник: http://robozone.su
| |||||||||||||||||||||||||||||||||||||||||
| Зарегестрируйтесь что бы скачать! |
| Есть логин? |
| Всего комментариев: 0 | |
|
|
|
|
|
|
Сделать бесплатный сайт с uCoz |
|---|